DirectX is a multimedia API that provides a standard interface to interact with graphics, sound cards and input devices and others.
The Graphic driver of the Colibri T30 supports HW accelerated Direct3D on feature level 9_1. If you have issues porting other Direct3D programs make sure you do not need a higher feature level.
1. Use an ethernet cable to plug the board in your local network.
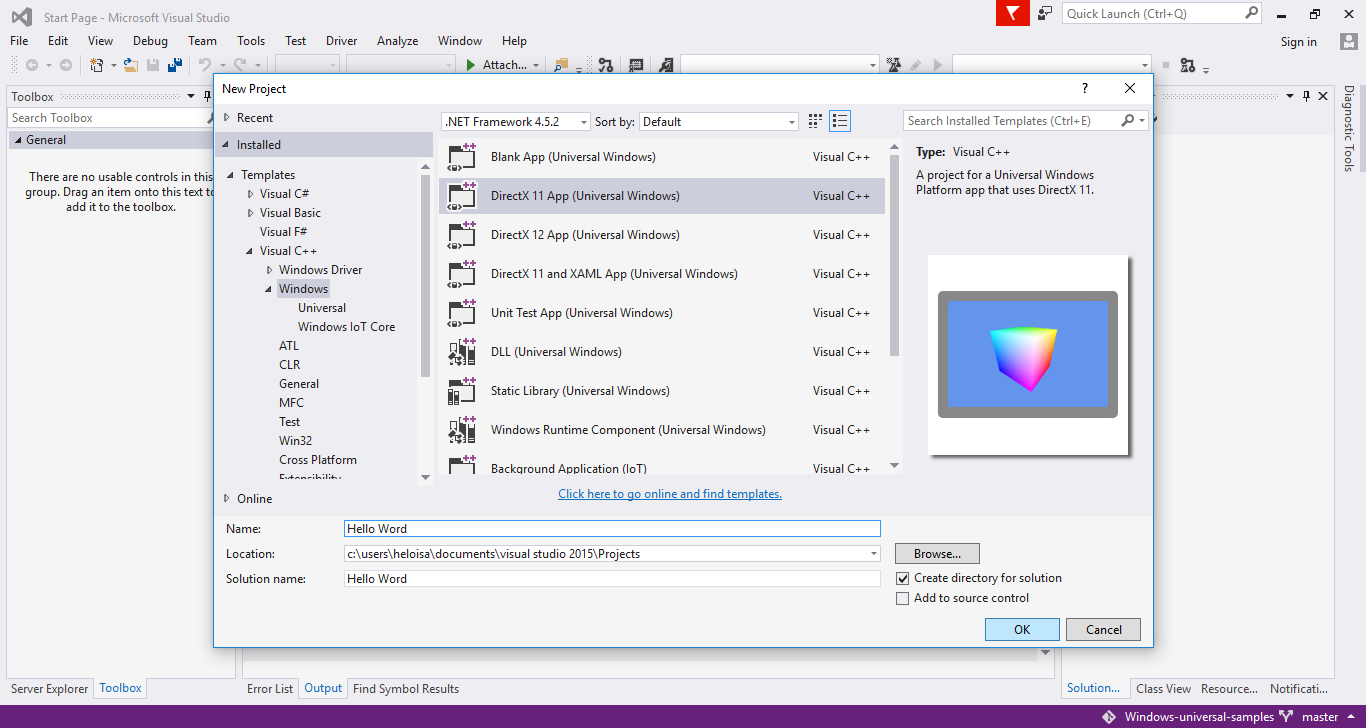
2. Start Visual Studio 2015 and select File > New > Project. Select Visual C++ and choose DirectX 11 App (Universal Windows), name your project and click OK.
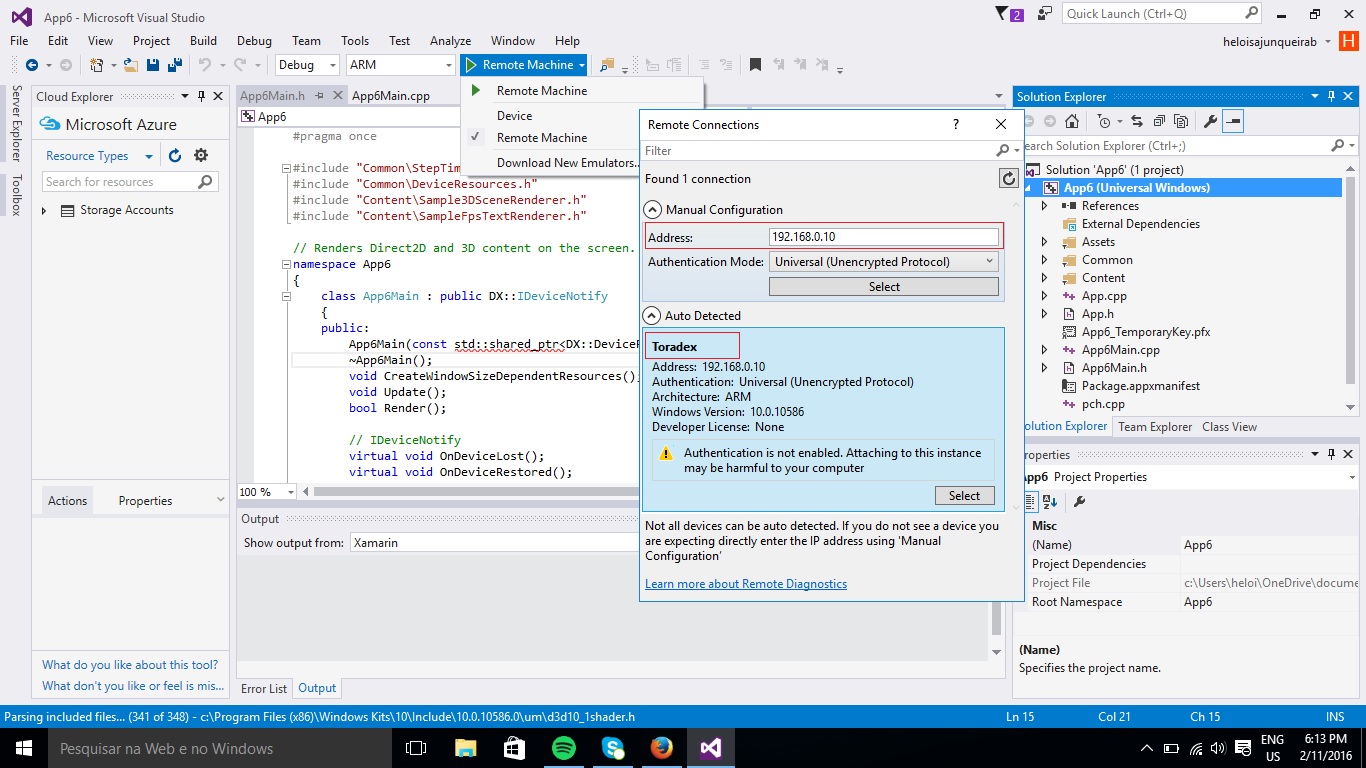
3. To debug the program choose the option ARM and Remote Machine. The window Remote Connection will pop-up, if the option auto detected found your device, choose it and press select, if not, enter the IP address of your Toradex Module in Address field and press select.
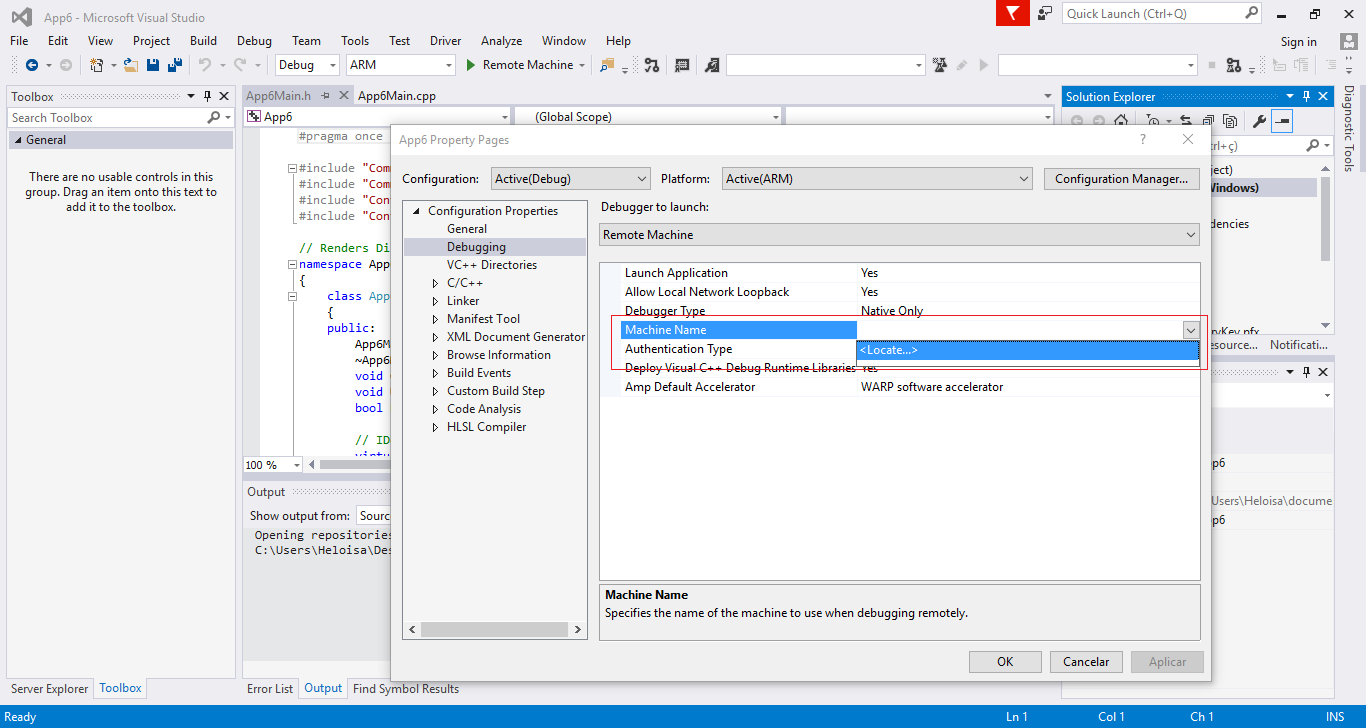
4. If the Remote Connection window doesn't open, select Debug > Properties in the Property Pages window go under Debugging and locate the Machine Name and choose < locate > . This will open the Remote Conection window so you can follow the steps above.
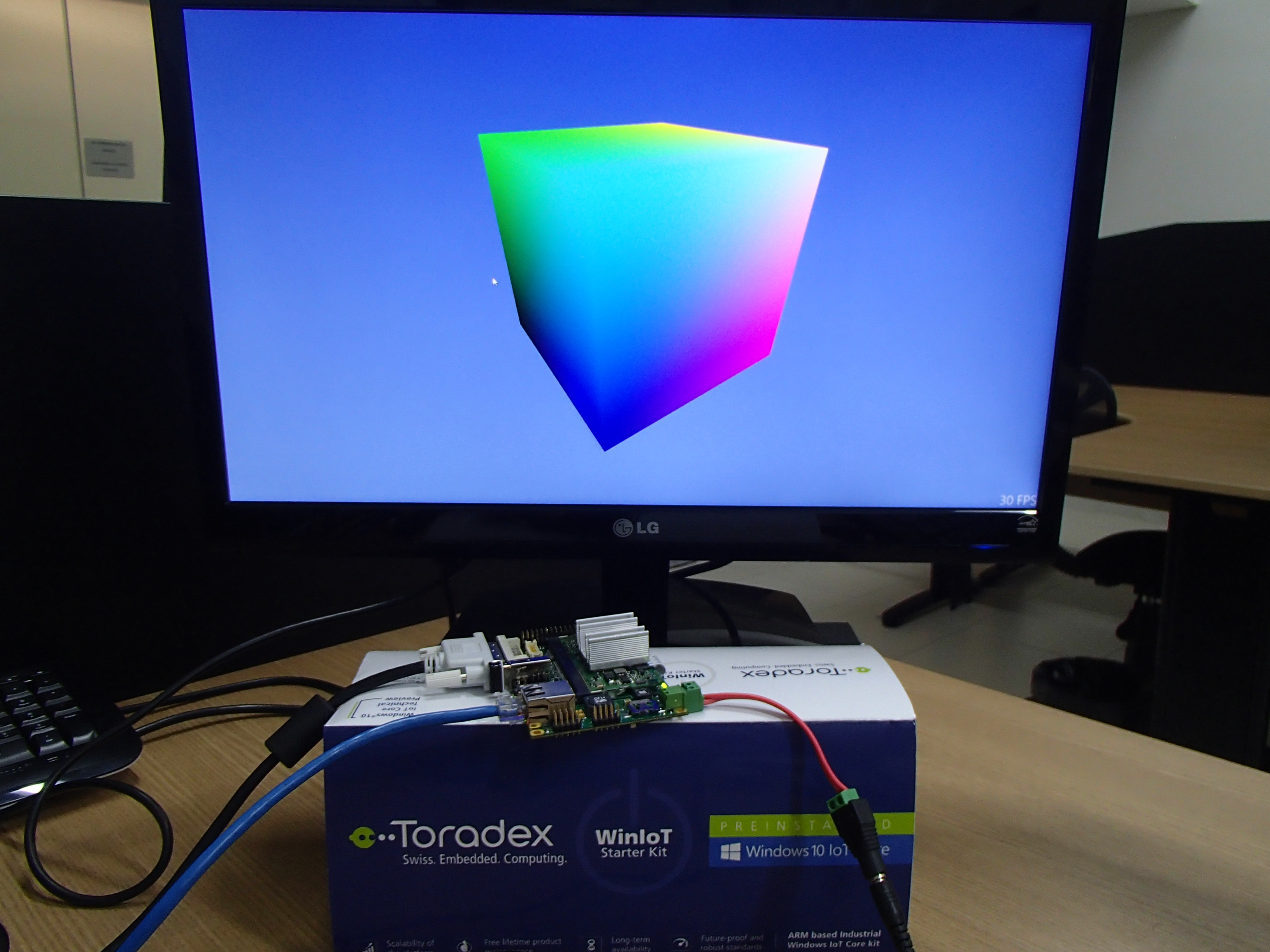
5. Now you can run your DirectX application by clicking Play Remote Machine and will start in your remote device. See below the Demo application running on Toradex Colibri T30.
Note: NVIDIA Tegra 3 SoC support up to DirectX 9 features only. Latest DirectX features will be software emulated and can show lower performance.
The figures below show a comparison of the DirectX demo App running on a Colibri T30 and in Raspberry Pi2, See in the button right corner the better performance featured by Colibri T30 , with 30 FPS, if compared to Raspberry, with 10 FPS. DirectX is hardware accelerated on the Colibri T30.
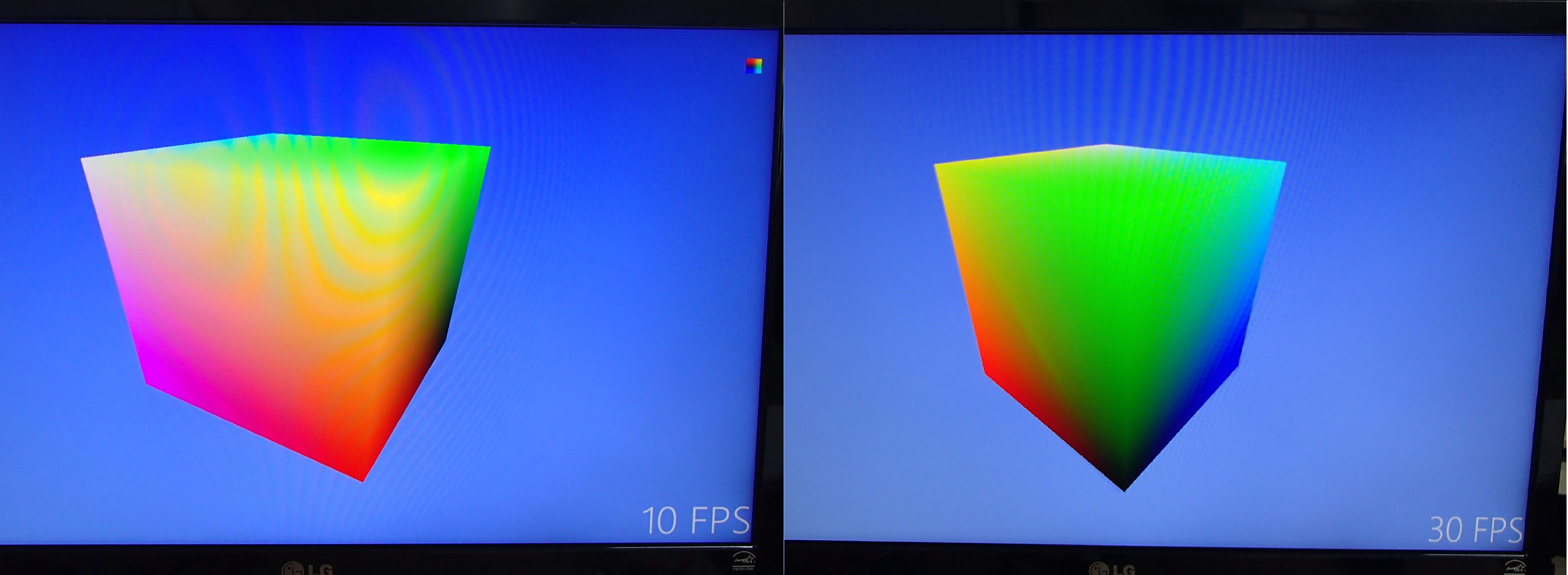
a)Raspberry PI2 | b) Toradex Colibri T30
